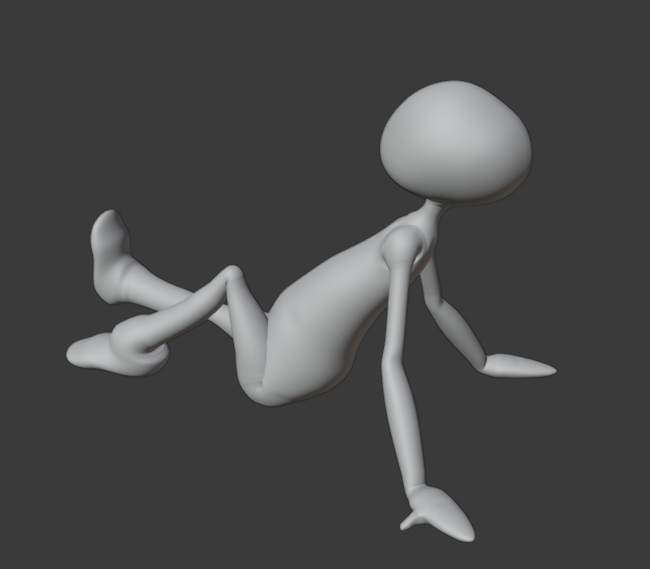
For this project, I wanted to try learning to make a rig of an organic humanoid and to make controllers for it. I did not make the character, but I did make the model based on a drawing of said character for a previous class. There are controllers for rotating each joint and the upper and lower parts of the spine and neck. There are also controllers attached to the wrists and ankles that not only allow you to move and rotate the hands and feet, but also switch between inverse and forward kinematics and determine whether the parents of the hand and foot bones will have influence over the rotation of the hands and feet. Each arm and leg has a pole controller to determine where elbow or knee points in inverse kinematics. There are separate controllers that make up a flat floor for each foot that can be used to easily keep the feet on the ground even if they are on different surfaces. Finally, there is a controller surrounding the bottom of the model that allows the whole rig to be moved and rotated. This was all new and exciting territory for me so it was difficult to know when to stop making more controllers. Below is an embed of a video showing off the rig's various functions in action and images of some poses I put it in.