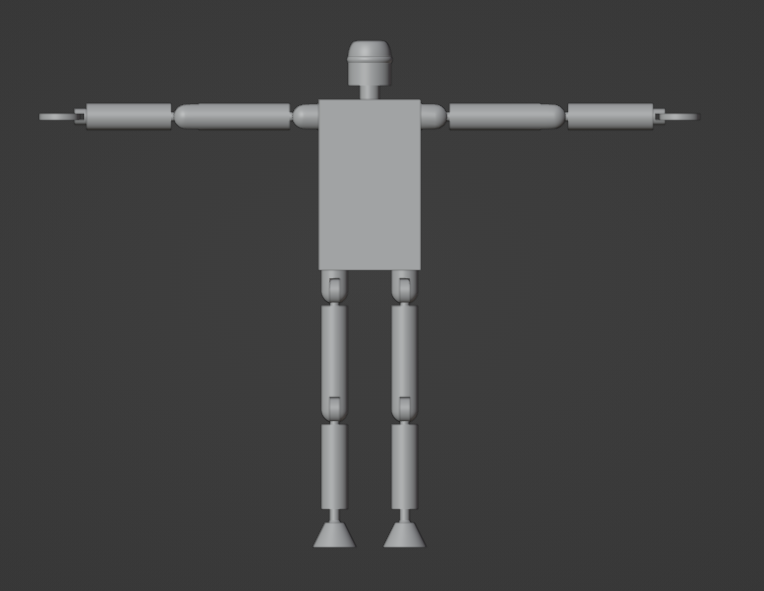
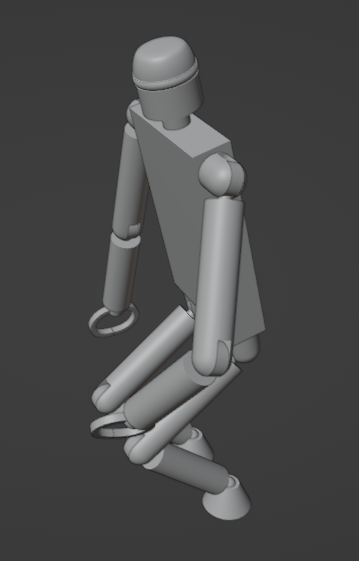
For this project, I was trying to learn how to rig. To make things as simple as possible, I decided to rig a robot. However, it turned out to be a lot more complicated than I thought because there were various constraints to make things work mechanically, so I ended up learning a lot about drivers. There are pictures of poses and video embeds demonstrating the rig's capabilities below.